
Историю современных радиопеленгаторов для аэропортов гражданской авиации можно отсчитывать от момента появления новой версии АРП «Платан» с процессорной обработкой и операционной системой. В то время было принято, что радиоприемные устройства (РПУ) — покупные «Юрки» будут компромиссным решением (за неимением радиоприемника своей разработки). Вначале разрабатываемое цифровое РПУ было частью пеленгационного проекта, но со временем руководство конторы решило выделить его в отдельное направление. Возможно, повлияло желание сделать унифицированный со связным приемник, хотя у каждой унификации есть своя цена. Но не будем забегать вперед )
По завершении разработки нового АРП «Платан» я переключился на собственные проекты, но продолжал интересоваться ходом модернизации пеленгатора, который должен был обзавестись своим радиоприемным трактом. И он появился: РПУ, более известное под названием ФИС, было выполнено на профессиональном уровне инженерами которые тогда еще работали в конторе (ну вот, снова вперед забежал). Классическая супергетеродинная схема с перестраиваемым преселектором обеспечивала отличные характеристики электромагнитной совместимости (ЭМС), такие как избирательность по соседнему каналу, подавление интермодуляционных продуктов. Ведь не секрет что эфир со временем не становится чище, и разнообразных помех, таких как профессиональные и любительские радиостанции, станций GSM, Wi-Fi и других становится все больше и больше. Поэтому обеспечение ЭМС выходит на первый план, тем более что современные радиокомпоненты позволили практически закрыть вопросы чувствительности АРП и улучшения отношения сигнал/шум.
Как и в АРП «Платан» с Юрками, так и с ФИСами у эксплуатации не было никаких нареканий. Но начиная с определенного времени, замечания посыпались. Вплоть до таких, как:
«у радиопеленгатора DF-2000 во время грозы, ложные пеленги на всех частотах. Думаем, что надо чувствительность прм. уменьшать,пока ждем ответа заводчиков» (с форума инженеров ЭРТОС).
На АРП с ФИС нареканий нет:
«У нас один из первых DF-2000 с ФИС ами. Ложных пеленгов на метеоявления, в отличии от АРП-75, не наблюдалось ни разу с 2008 года»
Это удивительно, потому что в радиопеленгаторе «Платан» была эффективная схема фазового обнаружения сигнала, которая давала очень низкие уровни вероятности ложной тревоги. И «пробить» ее на ложный пеленг, тем более при грозовых электромагнитных возмущениях, было нереально. Было очевидно, что что-то пошло не так. В конечном счете, причина была найдена: сбои в работе АРП DF-2000 были связаны с очередной модернизацией, а именно с заменой ФИС на цифровой приемник. Само собой, эта эволюция проходила уже без моего участия.
С этого места начинаем смотреть подробнее — как выполнен цифровой приемник, какая у него структура и где источник проблемы.
Цифровой радиоприемник в АРП DF-2000: тотальная «оптимизация»
Структурная схема пеленгационного приемника приведена на рисунке. Собственно говоря, это тот же самый приемник RS-2000, который используется в приемных центрах TRS-2000 производимых и поставляемых АО «Азимут». Разница лишь в фрагменте по правую сторону от АЦП — в программном обеспечении. И в том, что этот аппаратно одночастотный приемник превратился в РПУ, работающий на 4-х частотных каналах одновременно.
Ключевой аспект в этой истории — как раз слово «одновременно».
Конечно, сократить вчетверо объем радиоприемного оборудования — это хороший выигрыш по затратам. Рост стоимости радиопеленгатора идет за счет увеличения количества каналов, или РПУ. Вопрос лишь в цене: какими техническими характеристиками за это заплачено?
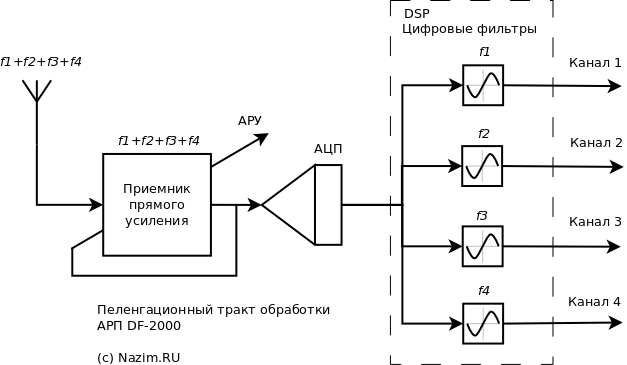
Аналоговая часть РПУ радиопеленгатора DF-2000 представляет приемник прямого усиления. Разделение частотных каналов происходит после оцифровки АЦП. Преселектор отсутствует, поэтому весь эфир из диапазона 118 -136 МГц поступает на вход АЦП.Внимание: такая схема построения подвержена блокированию и имеет плохие характеристики ЭМС!
Смотрим тракт начиная с антенной системы. Принимаемый сигнал усиливается в приемнике прямого усиления, с помощью АРУ загоняется в диапазон входных сигналов АЦП, и далее цифровая обработка сигналов выделяет свой частотный канал, подавляя сигналы других радиостанций. Поскольку в отличие от классической супергетеродинной схемы здесь нет преселектора, подобная структура имеет все недостатки приемников SDR. В одной статье я уже ссылался на подробное описание этих недостатков, сделаю это еще раз:
«Основным недостатком, ограничивающим широкое применение подобного типа РПУ (с прямой оцифровкой сигнала с антенны — мое примечание), является невозможность обеспечения высоких уровней динамического диапазона по блокированию. Поскольку на входе АЦП отсутствует фильтрация, то АЦП соответственно не может выполнять оцифровку одновременно сигналов большого и малого уровня. В соответствие нормам ГОСТ радиоприемник должен обеспечивать уровень восприимчивости по блокированию не менее 126 дБ/мкВ для РПУ второго класса и 130 дБ/мкВ для РПУ первого класса. Очевидно, что существующие типы АЦП 14-16 бит не в состоянии обеспечить выполнение этого параметра.
Кроме этого, РПУ данного типа недостаточно качественно осуществляют обработку сигналов малых уровней. При приеме сигналов уровней чувствительности, рост ошибок квантования, вызванный недостатком разрядности АЦП, вызывает невозможность качественного приема. Естественно, что эти ограничения разработчики пытаются снижать конструктивными и программными средствами, но до появления на рынке высокочастотных АЦП с разрядностью не менее 24 бит, приемники данного типа не смогут соответствовать современным нормам по электрическим параметрам и составить полноценную конкуренцию аналоговым РПУ».
Поскольку приемник прямого усиления никак не защищает вход АЦП от помех, то сигналы любого радиопередатчика из диапазона 118 — 138 МГц и не только — будут напрямую давить на вход АЦП и снижать его реальный динамический диапазон. Чужие радиостанции, VOR, DVOR, даже импульсные сигналы локаторов — будут способствовать блокированию АЦП, и дальнейшая цифровая фильтрация будет бессмысленной. Собственно, этот процесс и наблюдается в эксплуатации.
АРП DF-2000 блокирует сам себя: принципиальные ошибки построения тракта обработки
Вернемся к нашему рисунку. Проведем мысленный эксперимент: будем наблюдать одновременное прохождение пеленгуемых частот f1, f2, f3, f4 через приемный тракт. При этом создадим для АРП льготный режим: представим, что помех вообще никаких нет, то есть в районе аэродрома выключены все связные и радионавигационные устройства. И представим, что эти сигналы имеют одинаковый уровень: на связь одновременно вышли четыре борта с одинаковой мощностью радиостанции и на одинаковом расстоянии.
С антенны все четыре сигнала усиливаются в приемнике прямого усиления и подаются на вход АЦП. Автоматическая регулировка усиления (АРУ) наблюдает суммарный сигнал и не в состоянии различать сигналы по частотам, поэтому к 16-разрядной сетке АЦП будет приведена сумма сигналов f1, f2, f3, f4 и как результат каждый из них будет подавлен в 4 раза. Я хочу подчеркнуть еще раз: все, что находится в эфире в полосе 118 — 136 МГц — свои сигналы с борта и многочисленные источники излучения в этом диапазоне, будет усилено и поступит на вход АЦП, поскольку в АРП DF-2000 приемник не имеет преселектора, то есть 2 бита из 16 динамического диапазона АЦП мы уже потеряли. В цифровой части после АЦП помеховые сигналы отфильтровываются четырьмя фильтрами, каждый из которых настроен на частоту канала пеленгования, и извлекается пеленгационная информация. Пока все ОК.
Теперь изменим исходные условия и сделаем их приближенными к реальности. На высоте 10000м на дальности 350км летит борт, который выходит на связь. Такая дальность для АРП не диковинка: ее максимальное значение при такой высоте и мощности радиостанции 5Вт по ТТЗ составляет 360км. Поэтому радиопеленгатор должен отработать без проблем. Поскольку приемник прямого усиления DF-2000 усиливает все подряд в диапазоне 118 — 136МГц, на входе АЦП будет все, что работает в этой широкой полосе в районе аэропорта. Не будем считать мощные помехи от VOR, DVOR, а также гармоники мощных сигналов первичных и вторичных радиолокаторов. Ограничимся рассмотрением передатчиков местного приемо-передающего центра; предположим что в определенный момент на передачу выходят одновременно 8 радиостанций. Тогда на входе АЦП будет смесь слабого сигнала с борта и мощных радиостанций центра.
Вообще-то такие условия не вызывают затруднения для классического супергетеродинного РПУ или цифрового приемника с преселектором. В первом случае посторонние сигналы будут просто подавлены в тракте промежуточной частоты, во втором — ослаблены в преселекторе. Главное — чтобы сигналы не блокировали друг друга, тогда сохраняется возможность фильтрации.
В нашем случае главный подозреваемый на блокирование — АЦП. Если его небольшой динамический диапазон будет перегружен, то никаких нормальных сигналов на выходе мы не увидим.
Продолжаем наши опыты ) Для того, чтобы попасть в динамический диапазон, приемнику придется задействовать АРУ таким образом, чтобы сумма сигналов на входе АЦП не превысила максимального значения. При этом необходимо контролировать не суммарную мощность, а амплитуду. За счет биений суммарный сигнал максимальной амплитуды будет равен сумме амплитуд полезного сигнала и помехи.
Как и в предыдущем примере, АРУ откалибрует суммарный сигнал только по самому сильному составному — в нашем случае по помехам которые создает передающий центр. Усиление будет достаточным только для прохождения помех, а наш сигнал с борта потеряется на уровне младших битов АЦП.
Говоря другими словами, в четырехканальном тракте частота самого сильного сигнала блокирует сигналы более слабых передатчиков. То есть, в этом случае никакой «одновременной» работы четырех каналов радиопеленгатора не получается.
Это гипотеза, осталось подкрепить ее цифрами.
Считаем уровни
Найдем соотношение полезного сигнала и помех. В качестве помехи, как мы условились раньше, будем считать 8 передатчиков передающего центра, расположенные от АРП на расстоянии 500м. Для расчета будем пользоваться зависимостью потерь распространения в свободном пространстве FSPL (Free Space Path Loss, потери распространения в свободном пространстве):
^2")
Разница в дальностях до борта и передающего центра дает искомое соотношение; для R1=350км, R2=0.5км получаем:
^2=490000=56.9dB")
Теперь нужно учесть разницу между мощностями сигналов бортовой и наземных радиостанций, которая составит 100 Вт (земля)/5 Вт (борт) = 20 = 13dB, итого суммарно разница между сильным и слабым сигналом на входе АЦП составит 56.9+13=69.9dB.
По напряжению разница 69.9dB составит 3126 раз. Уточним еще раз: это разница между уровнем по амплитуде одной радиостанции передающего центра и радиостанции борта на входе АЦП. Теперь надо учесть, что радиостанций — восемь. При одновременной передаче максимальные амплитуды суммируются, поэтому разница в уровнях станет еще больше — 3126*8 = 25008. Что там с нашим динамическим диапазоном АЦП? Для 16 разрядов он равен 65536. После того как АРУ уместит суммарный пеленгуемый сигнал в разрядную сетку АЦП, для сигнала борта останется 65536 / 25008 = 2,62 уровня. Это практически 1 бит АЦП, который работает на уровне шума! Для сигнала работает только 1 бит АЦП: вот оно, блокирование.
Заметьте, что теперь нет смысла говорить про частотное разделение сигналов: сигнал с борта до фильтра просто не дойдет. Таким образом, в такой помеховой обстановке АРП DF-2000 борт просто не увидит. Что и наблюдается на практике.
Снова не могу удержаться, чтобы не заметить, что радиотехнику должны разрабатывать не программисты, а инженеры ) Концепция «все загоним в цифру а там уже разберемся» не работает. Как следствие — на выходе дешевое как в смысле стоимости, так и в смысле параметров изделие. Инженеры ушли, оптимизаторы остались.
А жаль, хороший пеленгатор был вначале.
Уважаемый автор,
а как Вы относитесь к новомодному методу постройки радиопеленгаторов Correlative Interferometer:
https://www.nutaq.com/blog/fpga-implementation-feasibility-study-correlative-interferometer-direction-finding-algorithm-0
https://www.nutaq.com/blog/fpga-implementation-feasibility-study-correlative-interferometer-direction-finding-algorithm
Подвержен ли данный вид радиопеленгаторов эффекту блокирования ADC или все зависит от наличия преселектора?
А там преселектор не при чем. Частота передатчика попадает прямо в створ всех приемников (в АЦП). Преселектор он для других задач, ослабить именно сигналы других частот, а не нашего выбранного передатчика. Аттеньюатором убирают блокировку АЦП. Причем это можно делать в зависимости от выбранного направления, ведь диаграмма направленности антенны тоже имеет место быть. Особенно если крутить ее начать ( механически или программно переключая фазы, тут от антенны зависит)
Под схемой с интерферометром обычно понимают измерение разности времен прихода импульсных сигналов. Судя по материалам статьи, это старый добрый фазовый метод, поскольку как следует из Таблицы 1, автор планирует пеленговать как протяженные сигналы (ФМ), так и достаточно длительные сигналы GSM — 288мкс.
Единственная разница — это параллельная обработка сигнала со всех вибраторов, в отличие от классической схемы последовательного опроса по кругу.
В статье есть некоторые натяжки и противоречия.
1. «The accuracy is also better than other DF techniques in the presence of multipath fading, inter-channel interference and external noise sources for similar antenna diameters».
Можно действительно избавиться от эффекта многолучевого распространения в интерферометре, когда отраженные от местного окружения импульсы запаздывают относительно тех которые идут по прямому пути, но это не для протяженных импульсов — тех же 288мкс GPS. Чтобы это работало, нужны длительности порядка микросекунд (что соответствует дополнительному пути 300 метров на каждую микросекунду). Так что это аргумент не для данной реализации.
Избирательность по соседнему каналу — вопрос к радиоприемному устройству (РПУ) а не к данной схеме построения. Ну а про внешний шум — никакого отношения к схеме построения он не имеет.
2. «The measurement of the elevation is possible».
Измерение угла места точно также можно сделать и при другой обработке, кольцевая решетка это позволяет. Правда точность в начальных углах будет никакая и будет возрастать только с увеличением угла места.
3. «The antennas usually used cover very large frequency ranges».
Проблема сделать антенну с хорошим перекрытием по частоте, потому что резонансные свойства вибраторов никто не отменял. К тому же в широком диапазоне ухудшаются фазовые характеристики вибраторов.
Есть проблема параллельной обработки, о которой автор не упомянул — это взаимное влияние вибраторов (переотражения внутри решетки), что ухудшает фазовую диаграмму. В пеленгаторах с последовательным опросом вибраторов это решается разрезанием неактивных вибраторов pin-диодами.
Теперь к существу вопроса: поскольку из структуры Fig.2. Overall DF architecture можно заключить, что FFT выполняется во всей полосе частот, тогда Radio Frontend, или РПУ, представляет собой неизбирательный приемник прямого усиления. И АЦП (тем более 14-битный) точно также может быть заблокирован любым сильным источником сигнала поблизости. Достаточно его попадания в широкий входной диапазон.
Судя по статье, автор планировал сосредоточиться на описании особенностей обработки в ПЛИС и пристегнул аналоговую часть (антенну и РПУ) чисто умозрительно. Однако такой «подход программиста» в реальности не работает; радиотехника требует определенного погружения.
Кстати, вспомнил как делали судовой АРП «Пихта-2С». В ТТЗ были жесткие требования по ЭМС, в частности по устойчивости к воздействию полей судовых КВ передатчиков напряженностью 100 в/м. Это значит на железке в несколько метров можно было получить несколько сот вольт напряжения. Конечно, чтобы АРП работал нужен был специализированный приемник (его и разработали). Прямая оцифровка с антенны не то чтобы не будет работать, а АЦП просто выгорит )
А почему 100 Вт р/ст. на земле? Ну и валить все на программистов(или наоборот, радиоинженеров) однобоко сильно. Как было составлено ТЗ, заводские испытания, приемо-сдаточные испытания у заказчика(не удалось выбрать момент и включить передатчики все вместе? Ну тут заказчик вляпался, реализовать такую проверку вполне можно, максимум сложности что это ближе к ночи надо, когда пункты МДП без полетов) — тут уж попытка найти крайнего просто.
АРП «Платан» старой версии(без всяких UNIX и т.д.) «Газельки» с неисправной электрикой по зажиганию вполне себе пробивают на пеленг (но тут не блокирование как таковое, согласен).
Если начинать с ТЗ, то как раз там все требования сформулированы корректно. И первые образцы АРП этому ТЗ соответствовали. По мере серийного выпуска произошла замена радиоприемного тракта на РПУ собственной разработки. После этого возникла проблема.
Можно предположить, что на ухудшение характеристик пошли сознательно по причинам снижения себестоимости. Когда работает такой аргумент, мнение инженеров и программистов не имеет значения
Но сдают-то каждый новый АРП по новым испытаниям при каждой установке, а не по сертификату/результату прошедших установок. Там и гарантия опять таки. Так что и заказчик малость не доработал при приемке, ему как-то желания сьэкономить фиолетовыми должно быть. Хотя его(ЭРТОС на местах) могла трясти своя бухгалтерия(юристы), требуя закрыть контракт по быстрее.
По гостовским правилам, полный объем испытаний для проверки соответствия ТТЗ выполняется во время приемочных испытаний, когда проверяется опытный образец. Сюда входят проверки по ЭМС.
Во время серийного производства, проводят приемо-сдаточные испытания (ПСИ), для каждого выпускаемого изделия, и периодические испытания — выборочно, для проверки стабильности тех. процесса.
Эти испытания проводятся по ограниченному перечню и проверка ЭМС в них не входит. Поэтому при существенном изменении конструкции АРП, а именно при замене РПУ которые соответствовали требованиям ЭМС, на цифровые приемники прямого усиления, которые не работают в помеховой обстановке, ухудшение параметров во время периодических испытаний выявлено не будет.
Проведут облеты, получат дальность и точность, на этом все закончится
Пример возможного тестирования Вами и приведен, он довольно таки несложный, записать особое мнение в акт приемки и потом отправить пару писем производителю никто не помешает, чисто для того, чтобы сказать, что со стороны службы эксплуатации своя работа сделана. А там пущай прокурор репу чешет, если не дай Всевышний чего случится. Косяки производителя в немалой степени проходят из-за лёгкости тестирования на местах. Хотя разработать свою методику проверки на местах часто очень проблематично, причем в ограниченные сроки. Как-то так.
Конечно. Попросить удаленный борт дать нажатие, увидеть пеленг и включить радиостанцию на передачу рядом. И посмотреть что будет с пеленгом.
По DVOR так и было — эксплуатация слала письма что нет дальности. Здесь ситуация зависит от условий, но эти условия как Вы правильно заметили несложно воспроизвести.
Кстати, также можно проверить и АППЦ, поскольку при перестройке по частоте в них перестраивается только радиостанция, но не фильтр (в нем частота устанавливается на заводе-изготовителе). Перестроить родную частоту на другую и попробовать вести радиообмен на дальности
Почему-то комменты провалились в корзину )
Восстановил
Здравствуйте в АДУ АРП DF2000 используется протокол RCE 2700. На других позициях нашего филиала используется протокол RCE 2000. Какая разница между этими протоколами и могут ли протоколы взаимодействовать между собой для мониторинга пеленгаторов находящихся на удаленных позициях? Или все же потребуется везде иметь протокол RCE2700?
Приветсвую! В чем принципиальная разница протокола RCE2000 и RCE2700? Могут ли они взаимодействовать между собой?
комменты?
Здравствуйте, к сожалению я уже не помню особенностей в реализации этих протоколов. Советую обратится с этим вопросом в тематический раздел на форуме http://www.ertos.ru , там есть раздел представителей промышленности, они отвечают на вопросы