
Эта история конечно имеет свои универсальные черты. Это означает, что разработка любой отечественной военной техники, не попадающей под непосредственное внимание первых лиц, идет примерно схожим образом. С другой стороны, в каждом проекте есть свои, отличающиеся от других особенности, и поэтому каждый волен выбирать, как ему воспринять эту историю: еще раз убедиться в том, как она подкрепляет свой печальный опыт или оптимистично протестовать в противоположном случае 😎
Мой рассказ — об отечественном военном аэродромном пеленгаторе. Именно аэродромном, поскольку АРП другого назначения, в том числе для радиоразведки, поиска и спасения находятся за рамками моего повествования. Да и тема аэродромной радиопеленгации для меня самая близкая, в которой я работаю с 1983 года.
Аэродромный радиопеленгатор для военных
Для чего военным аэродромный радиопеленгатор? Во первых, как одно из средств опознавания цели при использовании в составе радиолокационного комплекса — РЛК. И хотя опознавание может выполняться с помощью ответчика вторичного канала РЛК, пеленгационное опознавание, как и в гражданской авиации, обладает несомненным преимуществом — диспетчер однозначно ассоциирует отметку цели с бортом, с которым он ведет радиопереговоры. В качестве РЛК могут выступать как первичные радиолокаторы, так и комплексы радиолокационной системы посадки, например РСП-10. И пусть вас не смущает упоминание этого мастодонта времен 60-х. В нашем повествовании будет достаточно антикварной старины, которая до сих пор здравствует, работает и самое неожиданное — закупается )
Второй вариант использования — автономный, в качестве обычного аэродромного пеленгатора. Включая в свой состав средства связи, такой АРП будет самодостаточным средством для привода и посадки (визуальной, конечно) самолета на аэродром. Эта самодостаточность АРП, вкупе с его относительной простотой, является исключительной для быстрого развертывания временных аэродромов или подготовки постоянных аэродромов для прибытия своих сил, пока его обитатели об этом не подозревают )
Проследим историю развития отечественных военных аэродромных АРП во взаимосвязи с историей развития технологий. Ведь очевидно, что с появлением очередных технологических новинок возникает потребность в разработке все более совершенного радиопеленгатора.
История отечественных военных аэродромных АРП: отражение технологий

АРП-11. 8-вибраторная антенна пеленгатора расположена на крыше. Рядом — диско-конусная антенна связи
Начнем с ныне здравствующего АРП-11, входящего в состав РСП-10. Пеленгатор имеет 8-вибраторную кольцевую антенную решетку с центральным вибратором. Принцип пеленгования — амплитудный: два противоположных вибратора вместе с центральным образуют диаграмму направленности в виде кардиоиды, которая крутится за счет переключения кольцевых вибраторов. Благодаря направленным свойствам кардиоиды формируется огибающая принимаемого сигнала, которая зависит от направления прихода. Так извлекается пеленг.
Конечно, такая схема гораздо лучше, чем более древняя 4-вибраторная антенна Эдкока, но она также несет на себе родовые травмы амплитудной пеленгации: невозможность держать приемлемую форму диаграммы во всем диапазоне частот 100 — 400 МГц и низкая устойчивость к переотражениям от местных предметов. Плюс низкая технологичность изготовления антенны, сложность регулировки да и эффективность вибраторов в широком диапазоне тоже оставляет желать лучшего. Поэтому среднеквадратическая погрешность пеленгования 2° (что совсем неплохо для малобазовой антенны), максимальная — 4°, дальность действия на высоте 1000м — 80км.
На самом деле, точности лучше 2° для задач привода и опознавания и не нужно.
АРП-11 входит в состав радиолокационной системы посадки РСП-10 которая была разработана в 1960-х. Это невероятно, но ламповый локатор до сих пор пользуется спросом, и этому есть две причины. Первая — то что было разработано в наше время на замену, по своим параметрам как ни странно получилось хуже чем РСП-10. Плюс военные не испытывают желания платить за новый локатор полмиллиарда рублей. Вторая причина: в армию с тех пор не поступило никаких новых радиотехнических средств для посадки самолетов. Разработка современной микроволновой системы посадки MLS, которую вело АО «НИИ Сапфир», закончилась полуобразцом — полумакетом, который так и не прошел испытания. Пока выполнялась ОКР, Сапфир плавно разваливался и пришел к концу 2017 года с «впечатляющими» результатами со знаком минус: выручка за год 90 тысяч рублей (это не опечатка: тысяч, а не миллионов), состав сотрудников — 7 человек. Среди них есть даже один инженер. Знакомая картина, не правда ли? Тем более странно, что некогда процветающее предприятие было колыбелью для московского АО «Азимут», которое открестилось от своей альма-матер, предварительно облегчив последнюю от имеющихся ресурсов.
Поэтому АРП-11 в составе РСП-10 все также изготавливается по имеющимся заказам, правда полноценным изготовлением это сложно назвать. В основном это ремонт и разукомплектование разнообразных ЗИПов, хотя судя по объему контрактов можно было провести полноценную модернизацию, уменьшив объем железа в аппаратной раз так в пять. Однако, это история уже другого разваливающегося предприятия, на которой мы не будем останавливаться.
От АРП «Пихта-3,4» к АРП «Комар-2»
Бум интегральных микросхем совпал с ОКР, которая выполнялась в АО «НИИ Сапфир» в 1980-х годах. Я пользуюсь этим последним названием, поскольку контора несколько раз меняла наименования. ОКР «Пихта» предусматривала создание унифицированного ряда АРП для гражданского и военного применения, с числом одновременных каналов пеленгования от 2 до 18. Этот пеленгатор содержал уже фазовую антенную систему с 16 вибраторами, с радиусом решетки 1.6м. Примечательно, что с особенностями для военной версии решили вообще не заморачиваться — в нее вошли точно такие же блоки и антенна, как и в гражданской. Пихта-3, как АРП на колесной базе ГАЗ-66, дополнительно содержал систему жизнеобеспечения, а Пихта-4, предусматривающая контейнерный вариант, представляла из себя авиационный контейнер, содержащий те же блоки, забитые в тесное пространство контейнера.
Для военной антенны сделали единственное исключение — ее лучи складывались, чтобы ее можно было упаковать в ГАЗ-66 (про зеленый цвет я молчу). Во время смотра военной техники в Борисполе (внимание: это был еще Советский Союз!) наш конструктор с трудом, чертыхаясь, извлекал из задней двери это чудо дизайнерского искусства. Конечно, такая большая антенна военным вообще была не нужна. Но что поделаешь — унификация!
С военными Пихтами я проводил госиспытания в Ахтубинске в качестве ведущего инженера, что заняло больше года. Веселое было место, надо сказать, и зимой и летом ) В это же время мои коллеги проводили аналогичные испытания гражданской Пихты в Кишиневе (опять таки внимание… СССР). В конце концов, они благополучно завершились, изделия поставили на наш склад на ответственное хранение, и потом военные просто забыли про этот пеленгатор. После этого были еще модификации, но они также остались в единственном экземпляре.
Инженерные решения АРП на то время были достаточно продвинутыми, в ногу со временем. Конечно, своего радиоприемника в АРП не было — использовалась радиостанция Р-863. В тракте обработки находился синхронный фильтр с квадратурным разложением, сделанный уже наполовину цифровым способом. По линии связи передавались не напряжения север-юг, запад-восток, как в АРП предыдущих поколений, а формировался многочастотный код. Индикаторы пеленга из электромеханических стали полностью цифровыми. Параллельно быстро начали появляться процессорные технологии, поэтому Пихта как-то быстро начала устаревать. В то время я уже был главным конструктором нового пеленгатора с процессорной обработкой, о чем подробно рассказал в статье «АРП Платан: радиопеленгатор с FreeBSD».

Блок АРП «Комар-2»
Следующей вехой были два пеленгатора, которые по сути были практически одинаковыми: АРП «Комар-2» и «Радиан-90». Первый входил в состав военного РЛК, который разрабатывала Tesla Pardubice, второй — в состав военного локатора «Радиан-90» разработки челябинского НИИИТ. Поскольку я уже писал про АРП Комар-2, подробности опустим. Замечу лишь, что точно также опытные образцы АРП «Комар-2» такими и остались — серию военные не заказывали, что в принципе понятно: 90-е годы, Тесла Пардубице ушла вместе с Чехией под крыло НАТО, да и сам НИИИТ с локатором «Радиан-90» был не в лучшей форме. Технически, это был весьма продвинутый АРП, с обработкой на встраиваемой микро-ЭВМ пока еще советского производства, и имеющий складную фазовую 8-вибраторную антенну. Это был мой первый проект военного аэродромного АРП, в котором я был главным конструктором.
Платан-В?
Периодически МО РФ предпринимало попытки запустить целый аэродромный комплекс навигации, связи и посадки, с разработкой современных наземных средств. На излете 80-х годов таковой была ОКР «Мельхиор», где предусматривалась разработка стационарных, мобильных и высокомобильных комплесов данного назначения. Соответственно в ходе ОКР «Мельхиор» предусматривалось создание АРП-С, АРП-М и АРП-ВМ. «Мельхиор» во второй своей реинкарнации снова возник относительно недавно как ОКР «Рейс — 2000» с аналогичным названием «Разработка автоматизированной системы управления полетами, навигации, посадки, связи для военных аэродромов». Что самое интересное, название ОКР всплывает на первых местах в поисковой выдаче не на сайтах заказчиков и исполнителей, а в материалах арбитражных судов, отражая тяжбу МО с исполнителями в ходе выполнения ОКР 🙂 Точно также, в составе комплекса требовалась разработка радиопеленгатора.
Было бы странно, если Азимут не попробовал вписаться в этот проект. Однако, потеря специалистов и последующее скольжение вниз от R&D фирмы до производственно-строительной компании сыграло свою роль: поддерживать на плаву серийные изделия еще можно, но разработать новый АРП — уже нет. Была сделана попытка слепить АРП из тех узлов Платана, которые идут в серии, и тут в полной мере проявили себя просчеты в построении радиоприемного тракта, про которые я написал в статье АРП DF-2000: что пошло не так с этим радиопеленгатором. В условиях жесткой помеховой обстановки, которая сопутствует размещению АРП на военных позициях, приемник прямого усиления просто затыкался. Разработкой широкополосной антенны 100 — 400 МГц занимались уже непрофессионалы, и в результате военные заказчики зарубили этот проект, наспех состыкованный из узлов, разработанных еще в 2000-х.
Штрих к нынешним возможностям завода АО «Азимут»: как-то позвонил инженер, который сопровождает серию АРП DF-2000 (по факту не инженер а product manager). Возникла проблема на пеленгационной позиции в Ростове: АРП дает большую ошибку, зависящую от азимута воздушного судна. До того как сделать звонок мне они конечно попытались решить проблему своими силами, как то: меняя радиоприемники, блок обработки и даже источники питания 😈 Дело дошло до того, что они решили что на аппаратную действует помеха и заэкранировали радиоприемный тракт 🙂 (хотя он и на самом деле очень чувствителен к помехам). В общем, действовали так, как действует горе-автослесарь, который меняет все запчасти по кругу, пока авто не заработает. Между тем, эта неисправность очень характерна, и ее причина — отказ одного из вибраторов антенной системы. Зависимость величины ошибки от угла прихода сигнала объясняется тем, что неправильная фаза отказавшего вибратора занимает разное место в фазовой огибающей. Интересно то, что мне сразу не поверили, но когда провели тесты антенной системы — так оно и оказалось, и ростовская позиция заработала нормально.
Кстати, перед уходом из конторы я завещал оставшимся сделать контроль антенной системы в реальном времени и показал, как его реализовать. Такая система контроля была в АРП «Комар-2». Однако, план по направлениям модернизации АРП «Платан» так и остался на бумаге.
Таким образом, военная пеленгационная эволюция сделала причудливую петлю и вернулась к древнему АРП-11. После того, как мы поговорим о технологических барьерах, с которыми связана разработка нового военного АРП, в конце этой статьи я поделюсь своими заключениями относительно того, почему в нынешней системе взаимоотношений военный заказчик — исполнитель мало шансов на достижение конечного результата даже в том случае, когда эти барьеры будут преодолены.
Военный аэродромный радиопеленгатор — технологические барьеры
Технологическими барьерами называют ключевые технические решения, которые нужно найти для того чтобы обеспечить разработке современные параметры. По отношению к рассматриваемому радиопеленгатору, требуется существенный прогресс в следующих направлениях:
- мобильная широкополосная антенная система диапазона 100 — 400 МГц, обладающая приемлемой фазовой неидентичностью вибраторов в рабочем диапазоне;
- радиоприемное устройство (РПУ), обладающее высокими характеристиками электромагнитной совместимости (ЭМС), устойчивое к воздействию помех местного электромагнитного окружения;
- тракт обработки сигнала, выполненный с учетом ограничений по применению комплектующих.
Антенная система
Очевидно, что в пеленгаторе должна использоваться фазовая антенная система (АС). Она обладает свойством дискретности, то есть ее составные узлы могут быть отрегулированы порознь, что гарантирует работу антенны в сборе. В отличие от фазовой антенны, характеристики амплитудной (такая как в АРП-11) достигаются только совместно, что ведет за собой сложности в достижении требуемых параметров в процессе регулировки.
Поскольку к военному аэродромному АРП не предъявляются высокие требования по точности, с одной стороны, и требуется высокая мобильность — с другой, антенна может быть малогабаритной и как вариант — складной. Стандартные требования по времени развертывания АРП (из которого львиную долю занимает развертывание АС) — 30 минут личным составом из 2-х человек. Эта логика ведет нас к возможному варианту реализации 8-ми вибраторной антенне диаметром около 1.5м. Уменьшение базы АС, помимо увеличения ошибок, связанных с переотражениями, ведет к другому неприятному эффекту — возрастает роль фазовой неидентичности вибраторов. И если разброс по фазе более чем 5° для большой 16-вибраторной антенны не является критичным, то для малогабаритной антенны это становится преимущественным фактором. При этом, ухудшение точности идет сразу с двух сторон: с одной стороны, уменьшается база и как следствие амплитуда фазовой девиации полезного сигнала относительно фазовой ошибки вибраторов, с другой — уменьшается количество вибраторов, что снижает возможности по подавлению самой фазовой ошибки. В результате увеличивается инструментальная погрешность собственно антенной системы.
Таким образом, мы приходим к необходимости разработки эффективного вибратора на диапазон 100 — 150, 220 — 400 МГц. При этом лишний участок 150 — 220 МГц в существующих реализациях приходится обслуживать «бесплатно». Некий «усредненный» вибратор, покрывающий весь диапазон, будет работать плохо по следующим причинам:
- несоответствие фиксированной электрической длины изменяющейся в 4 раза частоте;
- наличием резонансных частот, в которых резко ухудшается фазовая диаграмма АС;
- высокий КСВ, снижающий чувствительность и как следствие дальность пеленгования;
- плохое согласование вибратора с фидерным трактом, что приводит к проблемам приема на подключаемые кабели и как следствие искажение фазовой диаграммы.
Решение задачи разработки эффективного вибратора может выполняться в двух направлениях.
1. Двухдиапазонный вибратор. Физически он будет состоять из двух компонент, каждая из которых рассчитана на свой поддиапазон. Остается открытым вопрос электрического согласования такой системы и какими фазовыми характеристиками она будет обладать.
2. Вибратор с переменной электрической длиной, зависящей от того в каком из поддиапазонов: 100-150МГц или 220-400МГц принимается сигнал. Решение подобного типа использует компания Rohde&Scwarz.
Есть и другие, более экзотические варианты, которыми нужно заниматься более обстоятельно. В любом случае, разработанное решение должно обладать свойством технологичности, что позволит серийно производить вибраторы АС, достичь стабильности параметров в серии и тем самым снизить затраты на регулировку.
Радиоприемное устройство
Для сложной помеховой обстановки совершенно не годится цифровое РПУ, выполненное по чистой схеме SDR. Почему — об этом подробно в вышеупомянутой статье АРП DF-2000: что пошло не так с этим радиопеленгатором. Военный аэродромный АРП требует применения приемника, выполненного по супергетеродинной схеме, с хорошим преселектором и эффективной АРУ. Причем это не будет классическое связное РПУ, потому что в радиотракте необходимо обеспечить прохождение двух сигналов: информационного с коммутируемого кольцевого вибратора и опорного с центрального вибратора. В соответствии с этим, появляются следующие альтернативы.
1. Классическая реализация с SSB (однополосным модулятором) в антенном тракте. Замечу, что поскольку в АРП «Платан» сейчас используется не специализированный пеленгационный, а стандартный приемник из АППЦ, однополосный модулятор там по прежнему присутствует. Недостатки этого метода известны: потери на SSB и неоправданное расширение полосы пропускания РПУ, связанное с необходимостью пропуска двух разнесенных частот. Есть еще один, не столь очевидный минус: ограничение по масштабированию, когда может понадобиться пеленгование ЧМ и ППРЧ сигналов. В этом случае низкое значение частоты обработки (такое как 4200Гц в АРП «Тополь» или 5550ГЦ в АРП «Пихта») ставит крест на дополнительном функционале.
2. Интересная реализация двухканального радиоприемного тракта, выполненная следующим образом:
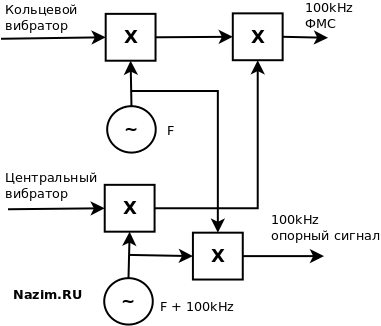
Двухканальный радиоприемник АРП «Пихта-2С»
Такую реализацию я заложил в судовой АРП «Пихта-2С». Впервые в этом радиопеленгаторе было применено специализированное РПУ своей разработки. Поскольку судовые радиостанции работают в диапазоне 100-180 МГц и используют частотную модуляцию, вариант SSB не мог быть использован. В этом РПУ за счет разнесенных по частоте гетеродинов формируется несущий и опорный сигнал стабильной частоты, в результате чего ЧМ которая присутствует во входном сигнале полностью подавляется. Остается только информация о фазовой модуляции, вызванной коммутацией вибраторов антенной системы.
3. Раздельные РПУ для центрального и кольцевого канала, связанные общим синтезатором. Особенности такого построения — это девиация выходной частоты РПУ, связанная с изменением частоты входного сигнала. Другими словами, выходная частота РПУ по центральному и кольцевому каналу не является стабильной, что предъявляет дополнительные требования к тракту обработки сигнала, и в частности исключает прямое использование преобразования Фурье (FFT).
Для устойчивости к помехам РПУ АРП должен иметь возможность точной перестройки относительно узкополосного преселектора и иметь внеполосную АРУ.
Тракт обработки сигнала
Этот компонент наиболее чувствителен к требованию по использованию отечественных комплектующих. Номенклатура встраиваемых вычислительных средств, выпускаемых отечественной промышленностью, серьезно ограничена. За бортом сразу оказываются производительные ARM и DSP процессоры, а также матрицы FPGA. Максимально, на что можно расчитывать — отечественные аналоги контроллеров (MCU) STM32. Это отбрасывает нас во времена разработки АРП «Комар-2», когда операцию вычисления арктангенса приходилось выполнять численным методом, по причине отсутствия операций с плавающей точкой. Конечно, прибавка в скорости на порядок не помешает, но тесные рамки аппаратной архитектуры все равно будут сказываться. Пожалуй единственное преимущество MCU — это время начало работы, которое можно характеризовать одной фразой: начинает работать сразу. В отличие от встраиваемых платформ на базе Linux, где ждать загрузки операционной системы нужно ждать несколько десятков секунд.
На одной из ARM конференций, организованных Texas Instruments, один из докладчиков рассказывал как они обходили это ограничение. Заказчику демонстрировался включенная LED панель системы в то время как она продолжала свою загрузку. Не самый жестокий трюк для надувательства военпреда )
И само собой, тракт обработки может содержать следующие модули, которые расширяют функциональность АРП:
- Защита от перемодуляции входного сигнала. То что в ТТЗ написан максимальный коэффициент амплитудной модуляции 80%, ничего не значит. Часто с борта идет перемодуляция с пропаданием сигнала. Радиопеленгатор в этом случае должен сохранять стабильное пеленгования без срыва обработки.
- Подавление вертолетного эффекта. При работе радиостанции с вертолета возникает паразитная фазовая модуляция, связанная с переотражением передаваемой несущей от лопастей вращающегося вертолетного винта. Тракт обработки обнаруживает наличие дополнительных компонент во входном сигнале, связанных с вертолетным эффектом и подавляет их с помощью включения специальной фильтрации. Вертолетный эффект не изменяет характеристики радиосвязи и влияет только на пеленгацию, из-за фазового принципа АРП.
- Обнаружение выхода из строя вибратора. В классическом пеленгаторе выход из строя вибратора ведет к прекращению работоспособности АРП. В данном случае процессор с помощью демодулятора определяет вышедший из строя вибратор и исключает его из обработки, дополняя пропущенные значения интерполяционным алгоритмом. За счет некоторого увеличения погрешности пеленгования работоспособность АРП сохраняется до замены неисправного вибратора.
- Адаптивное сокращение времени пеленгования. Для бортов, не находящихся на предельной дальности, АРП может выдать отсчет пеленга заданной точности не используя всю длительность пеленгуемого сигнала 0,5с. Для подобных сигналов пеленг может выдаваться с ускоренным темпом с периодом 0,2с.
- Поиск по частоте. АРП может работать в режиме быстрого поиска сигнала по 10 предопределенным частотам. В зависимости от настройки, пеленгатор может остаться на частотном канале на котором был обнаружен сигнал, или продолжить сканирование с записью пеленга в журнал.
- Оценка дальности и угла места. АРП может оценивать и выдавать косвенную приближенную оценку этих двух параметров. Это особенно полезно, когда радиопеленгатор используется в паре с радиолокатором для опознавания целей. В этом случае оператору проще ориентироватся на индикаторе обстановки;
- Оценка целостности сигнала. Данная опция повышает устойчивость к помехам РЭБ. АРП позволяет определить направление на источник помехи вне зависимости от используемого вида модуляции.
В настоящий момент, разработаны прототипы этих компонентов АРП. Как только мы выберем самые успешные реализации, сборка образца военного аэродромного АРП не за горами 🙂
Военный аэродромный радиопеленгатор — административные барьеры
Прочитал сегодня очередные новости. ПАО «Звезда» сорвало поставку дизелей для 19-ти малых ракетных кораблей. Самое интересное заключается в том, что еще до подписания контракта было известно, что эта фирма не в состоянии выпускать более одного двигателя в год, что не помешало ей освоить все полученные авансы (ну а что, банкротить же нас не будут). Другой пример — АО «НИИ Сапфир», у которого в прошлом разработки радиопеленгаторов и систем посадки MLS. Сейчас в этой фирме среднесписочная численность персонала — 7 человек, из которых всего один инженер.
Интересная получается картинка. Некогда знаменитые оборонные предприятия, включая упомянутые выше, которые по факту своего рождения получили целый иконостас лицензий на разработку, производство и ремонт военной техники, по прежнему могут заключать контракты с Минобороны. Это несмотря на то что выполнить эти контракты они не в состоянии: выполнять просто некому, все квалифицированные инженеры давно уже занялись более доходным занятием (зато есть генеральный директор с печатью, который может надувать щеки и слать договоры на подписание). С другой стороны, коллективам которые могут вести квалифицированную разработку, доступ к военным заказам закрыт. Я конечно не имею в виду эти же самые дизели, стволы для пушек и гусеничные катки — пусть этим занимаются заводы, на которых еще стоят станки марки ДиП («догоним и перегоним»), а то и довоенные немецкие. Современные же вооружения критически зависят от средств связи, навигации и радиолокации, и это как раз та область, в которой привязанность к старым технологиям только мешает. И в эту область можно было запустить просто огромное число специалистов, которые могли просто перебить традиционные предприятия по части достигнутых результатов.
Посмотрим в сторону наших потенциальных противников, этих акул империализма — как они расправляются с малым бизнесом на потребительском рынке (как нам твердят постоянно), а уж о государственных контрактах наверное и смысла нет говорить? Ан нет, вот например в США работают программы SBIR/STTR, которые позволяют маленьким компаниям участвовать на равных в военных разработках. Программа стартанула в 1992 году и будет продолжаться по крайней мере до 2022 года. По американским правилам, каждое федеральное агенство с бюджетом более 100 млн. долл. должно выделять определенный процент для контрактов и грантов для малого бизнеса. Что касается американского Министерства Обороны, ежегодно для целей разработки малому бизнесу выделяется бюджет в 1 млрд. долларов, причем около половины этого бюджета идет малым предприятиям в которых работает менее 25 человек и треть — в которых работает менее 10 (если вас интересуют пикантные подробности, то пятую часть гарантированно отдают меньшинствам и фирмам которые возглавляют женщины). По статистике, каждый год примерно четверть компаний малого бизнеса выигрывает тендер в первый раз. Какой нереальный разрыв между подходами к малому предпринимательству в США и у нас! Все разговоры о защите отечественного малого бизнеса это просто пустые слова по сравнению с реальными американскими бюджетами, которые говорят сами за себя.
Положения этих программ настолько интересны, что я остановлюсь на этом немного подробнее.
Программа SBIR/STTR для участия малого бизнеса в военных разработках в США
Принципиально важно то, что от малого бизнеса не требуют сразу готовых изделий и продуктов, которые они должны разрабатывать за свой счет, а помогают их создать. Помогают деньгами и не только. Для этого весь процесс разбивается на три этапа:
Этап I носит название «осуществимость проекта» и включает в себя только научные, технические и коммерческие предпосылки для предлагаемых идей и решений — нечто вроде НИР. Этот этап оплачивается в относительно небольшом размере. На этапе II выделяются деньги на разработку прототипа, который должен подтвердить достижение целей этапа I — это больше соответствует нашей гостовской стадии эскизно-технического проекта. На этапе III выполняется коммерциализация проекта — привлечение инвесторов для доведения проекта до стадии производства и поставки. Очевидно, что инвестора найти гораздо проще, если у вас есть работающий прототип.
Организаторы программ подчеркивают цели, для чего это было придумано. Каждая строчка здесь буквально кричит: почему это не делается у нас?!
Цели программ (в скобках мои комментарии):
- стимулировать технологические инициативы в частном секторе (малый бизнес это не только торговля мобильными телефонами и стрижка собачек, но и современный уровень техники — американское государство об этом заботится!);
- использовать возможности малого бизнеса для в разработках федерального правительства;
- поощрять участие фирм, неблагополучных в экономическом плане (надо же, за государственный счет лузерам помогают);
- обеспечить сотрудничество между малым бизнесом и исследовательскими институтами (что очень важно, поскольку последние располагают большим массивом информации по перспективным направлениям, уже достигнутым результатам и наиболее актуальным задачам);
- сократить разрыв между исследованиями и внедрением на рынке (это звучит чисто по-американски).
Подчеркну особенность каждой из двух программ:
SBIR
Своими силами должен быть выполнен объем в 2/3 от всей разработки на I этапе и 1/2 на втором.
STTR
Работа выполняется в партнерстве с исследовательскими институтами в пропорции:
- 40% получает малый бизнес;
- 30% работ выполняют НИИ.
Быть военному пеленгатору или не быть?
Последнее время ознаменовалось странной активностью вокруг этой темы 🙂 Появляются разные люди — от директоров заводов до посредников, которые предлагают сделать АРП. Причем, все они действуют по разному: одни пытаются получить подлинники АРП-11 и начать клепать это старье — а что, Минобороны платит. Другие подозревают нас в том что мы прячем под подушкой чертежи нового военного радиопеленгатора и предлагают их выкупить (за смешную сумму). К слову, готовой КД у нас нет, но разработки которые можно в КД быстро превратить есть. Третьи размахивают флагом, говорят о судьбах Родины и предлагают дружно напрячься и сделать радиопеленгатор забесплатно и своими силами, а Родина конечно потом не забудет, все поймет и простит.
Их всех объединяет только одно: эти люди потерялись в прошлом времени, когда можно было платить инженерам что-то типа 17 тысяч рублей в месяц и одновременно получать сотни миллионов рублей на поставках в МО. Их очень сильно ломает, когда называют реальную стоимость проекта. Они уходят, делают круг — ищут специалистов, не находят их и возвращаются. С каждым возвращением у них потихоньку меняется представление об окружающем мире. Не знаю, меняется ли это представление у самого Минобороны — похоже, там еще не сложилась картинка что все не очень хорошо. Или наоборот — достаточно хороших нарисованных картинок и мультиков, ведь мы живем в век пиара — без него никуда.
В общем, сильно похоже на то, как говорят ИТ-шники: деньги на новый мерс есть, на новый сервер нет. На этом и завершим наше эссе 🙂
Интерестный материал!
Подскажите где можно больше узнать по поводу:
— «Вибратор с переменной электрической длиной от компании Rohde&Scwarz»
— контроль антенной системы в реальном времени?
Благодарю
В материалах фирмы указывается на использование диполей с изменяемой электрической длиной:
https://cdn.rohde-schwarz.com/pws/dl_downloads/dl_common_library/dl_brochures_and_datasheets/pdf_1/ADDx_multichannel_bro_en_0758-1106-12_v1000.pdf
«Antenna elements with variable electrical length for optimal adaptation to the receive frequency (20 MHz to 1.3 GHz)»
Можно предположить, что как и в отечественной практике, это достигается разрезанием диполя на части с помощью pin-диодов.
Контроль антенной системы:
пассивный — без вмешательства в работу АРП: при отказе вибратора в наблюдаемом сигнале наблюдается провал. Именно провал, а не шум приемника, поскольку за это время АРУ не успевает отрабатывать. Соответственно это — признак отказа;
активный — кратковременное включение генератора контроля антенны с излучением через центральный вибратор, далее наблюдаем сигнал с одинаковой фазой на всех диполях.
Тут не только военные, интересен даже какой-то портативный пеленгатор по определению направления разных сторонних радио-помех. Вроде по работе не столь заметно, но несколько напрягает. Что в радиосвязи, что в радио-локации/навигации.
Про источники помех знать очень полезно. Бывают даже самые простые случаи — на борту залипла тангента, и попробуй найди у кого. Может есть смысл делать не сколько портативный, сколько на автомобиле — все равно чтобы засечь источник по триангуляции нужно будет перемещаться. В процессе движения можно будет сразу определить приблизительное направление на помеху.
Сделать можно, вопрос как обычно в бюджете )
«Залипшая тангента» на борту определяется опросом всех ВС, не все диспетчера просто знают про факт возможности залипания на борту, из известных мне случаев(2-3 правда всего) — залипает всегда у последнего на связи, который или отвечает, или уходит на перестройку частоты. Ну или военные, там вообще трэш может твориться, что по радиоканалу, что по ВРЛ.
Как в пословице про море — «бойся рыбака и военного моряка»
Бюджет… Скажете тоже. На пару SDR-свистков, ардуину-малину + 3-4 «шилды» — вот весь бюджет ;). Вот идея для Сколково и прочих научных рот/батальонов. Ну или для конкурса студентов под эгидой ФГУП «Госкорпорация по ОрВД». Да хоть дипломного проекта.
Не все так просто с парой свистков. Взаимной синхронизации не будет, поэтому придется разбирать и паять. Так делают, в сети есть примеры. Только вот загвоздка — не будет синхронизации нескольких свистков на USB выходе, потому как чип каждого квантует как ему вздумается.
Чем так, лучше свой SDR сделать. И окунулись в разработку…
Широкополосный вибратор опять таки настроить — нужны хорошие приборы. Счет пойдет на сотни тысяч рублей )
Ну здесь работа не для одного студента, а для целой группы. Не говорю, что это просто. Ну и широкополосного ничего не надо, волновой канал, иногда направление помехи вполне известно. А вот кому за неё предъявлять — в упор не ясно.
Кстати, можно просто механически крутить пару логопериодов. Часто бывает что технологии делают виток и возвращаются, если раньше механику ругали, то сейчас можно найти недорогие приводы. Вся электроника поместится на вращающейся платформе, только питание подать.
Тогда все вообще резко упрощается )