
Принцип работы
Классический, моностатический радар использует антенную систему с совмещенными функциями передачи зондирующего сигнала и приема отраженного. Бистатический радар содержит разнесенные антенны, одна из которых в передающем тракте Tx передает зондирующий сигнал, другая — в приемном тракте Rx принимает отраженный сигнал.
Частным случаем бистатического радара является пассивный радар (Passive Coherent Locator — PCL), который не имеет собственного передающего тракта, как и передающей антенны, и использует излучающие источники радиоокружения. Выигрышные стороны PCL — это отсутствие собственного излучения, что затрудняет его подавление, простая антенная система, а также малая потребляемая мощность (до 100 Вт) и объем аппаратуры.
По аналогии с PCL, в данном случае рассматривается реализация бистатического радара, использующего непрерывный излучающий сигнал. Данный режим имеет принципиальное отличие от традиционного импульсного режима классических радиолокаторов, когда последние принимают отраженный импульс в моменты времени, когда излучение мощного зондирующего импульса уже завершено. В нашем случае, бистатический радар ведет прием непрерывного отраженного сигнала на фоне мощной помехи, которая представляет собой зондирующий сигнал.
Если для PCL отсутствует возможность влиять на радиоокружение для получения наиболее выигрышного соотношения отраженного сигнала и помехи, для бистатического радара такая возможность имеется. Поэтому бистатический радар, по сравнению с PCL, позволяет выполнить следующую дополнительную оптимизацию:
- достичь максимального подавления в прямом направлении на собственный сигнал излучения путем управления диаграммой направленности как в точке излучения, так и в точке приема;
- выбрать форму излучающего сигнала для получения лучшей функции неопределенности по доплеровскому сдвигу и времени задержки, приближенную к дельта — функции.
Бистатический радар воздушного базирования
Рассмотрим концепт построения бистатического радара воздушного базирования. Радар предназначен для обнаружения маневрирующих воздушных целей с ожидаемым направлением подлета и определения их координат (Рисунок 1). Оборудование бистатического радара базируется на двух БПЛА (беспилотных летательных аппаратах). На нижем по рисунке БПЛА размещена передающая часть радара Tx, на верхнем БПЛА — приемная часть Rx.
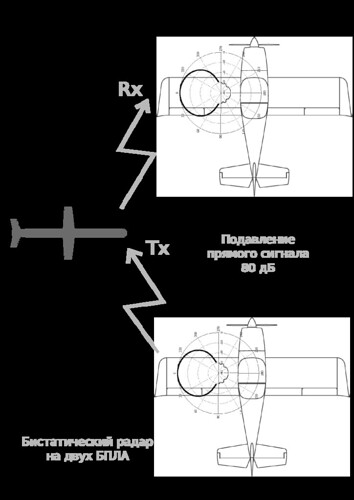
Рисунок 1. Бистатический радар UAV базирования, состоящий из передающей части Tx и приемной части Rx
Для частотного диапазона от 100 до 500 МГц размах крыла БПЛА может составлять от 1 до 3 м.
Как передающая, так и приемная часть радара содержат идентичные направленные антенны, которые имеют нелинейную, в частности логопериодическую структуру, которая может формироваться как физически, так и электронно из антенных элементов. Антенна может быть частью конструкции радиопрозрачного крыла БПЛА.
Максимум диаграммы направленности антенн формируется в сторону ожидания поступления цели со стороны одного борта БПЛА, причем БПЛА двигаются в направлении примерно перпендикулярном направлению движения цели. Расстояние между БПЛА может составлять от 1 до100 км.
При типовом значении подавления в антенной системе в направлении соседнего БПЛА 40 дБ, развязка по помехе между Tx и Rx составит 80 дБ, что ставит бистатический радар в неизмеримо более выигрышную по соотношению сигнал/помеха ситуацию по сравнению с PCL.
Характеристики радара могут быть существенно улучшены применением синтеза апертуры антенны.
Для работы приемной части Rx радара, помимо отраженного сигнала, также используется прямой (помеховый) опорный сигнал, поступающий напрямую от Tx. Принцип приемного тракта основан на построении функции неопределенности принимаемого отраженного сигнала на основе опорного в двумерной плоскости координат: по доплеровской частоте и по временной задержке (Рисунок 2).
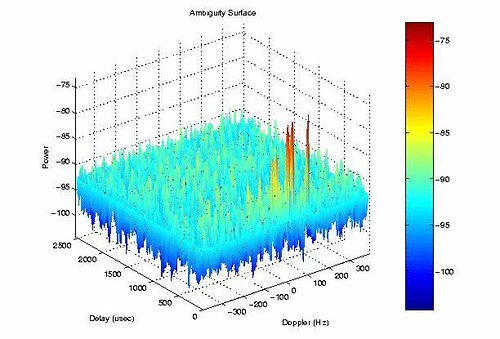
Рисунок 2. Функция неопределенности сигнала бистатического радара
На рисунке показана функция неопределенности сигнала бистатического радара. Функция содержит главный пик на нулевой отметке (Delay = 0 us, Doppler = 0 Hz), который соответствует прямому распространению сигнала от Tx к Rx (помеха). Другие пики соответствуют движущимся целям (эхо — сигнал), в частности отметка цели с доплеровским сдвигом Doppler = 100 Hz. Сопоставимые уровни помехи и эхо-сигналов обясняются подавлением помехового сигнала в тракте обработки.
Для корректного определения координат целей требуется определение координат каждого БПЛА в течение времени обнаружения и сопровождения цели. Данное время составляет около 1 с, что позволяет достичь очень узкой полосы доплеровского фильтра в 1 Гц. Данные значения ограничены стабильностью несущей частоты передатчика и взаимной флуктуацией расстояния между БПЛА в течение 1 секунды.
Только для обнаружения цели, без определения координат знания координат БПЛА и расстояния между ними не требуется. В этом случае информационным параметром, который будет передавать бистатический радар, будет оповещение типа «приближение объекта с радиальной скоростью 900 км/ч на приблизительном удалении 100 км».
Энергетический бюджет радиолинии
Для оценки уровней принимаемого полезного отраженного эхо — сигнала и помех воспользуемся уравнением бистатического радара, приведенного в статье «Bistatic and Multistatic Radar Systems»:
Для типовых, практически значимых значений параметров, в частности: излучаемая мощность передатчика Tx 10 кВт, расстояние до цели от приемника Rx и передатчика Tx 50 км и 80 км соответственно, ЭПР 10 кв.м, частота 100 МГц искомые значения Pr для сигнала и помех сведены в таблицу (таблица приведена в цитируемом источнике).
| Тип сигнала | Уровень на входе Rx | Относительный уровень |
| Тепловой шум | -121,0 dBm | +8,8 dB |
| Прямой сигнал Tx->Rx | -37,7 dBm | +92,1 dB |
| Электромагнитный шум | -90,0 dBm | +30 – 40 dB |
| Переотражения | — 99,8 dBm | +39,8 dB |
| Эхо — сигнал цели | -129,8 dBm | 0,0 dB |
Как видно из таблицы, при отражении от цели мощность эхо — сигнала в точке приема составит -129,8 dBm, что для типовой нагрузки 50 Ом составит 0,1 мкВ. Электромагнитный и тепловой шум не являются проблемой, поскольку в процессе обработки в доплеровском фильтре происходит сжатие сигнала до полосы 1 Гц, что дает увеличение отношения сигнал/шум на величину около 50 дБ. Вследствие этого отношение сигнал/шум для данных видов помех составит около +10 дБ.
Гораздо более серьезным и интенсивным источником помехи является прямой сигнал, идущий напрямую от передатчика Tx к приемнику Rx минуя цель. Точно также как и для переотражений, которые являются аналогичной помехой, единственными различающими параметрами для эхо — сигнала являются приобретенные доплеровский частотный сдвиг и запаздывание сигнала по времени.
Как следует из таблицы, а также из практических приложений, превышение помехи над сигналом может составлять 90 — 100 дБ. Задача подавления прямого сигнала для PCL решается комбинацией следующих методов:
- формирование минимума диаграммы антенной системы в направлении помехи: 20 — 30 дБ;
- использование в тракте обработки адаптивного фильтра, который настроен на подавление сигнала базовой станции, а также более сложных реализаций лестичных адаптивнных фильтров с ортогонализацией Грамма — Шмидта: 30 — 40 дБ;
- различение на уровне боковых лепестков функции неопределенности: 30 — 40 дБ.
Бистатический радар с собственным передатчиком Tx, как отмечалось выше, обладает еще большими возможностями по подавлению собственного прямого сигнала. За счет управления диаграммами приемника и передатчика достигается дополнительное подавление +40 дБ; использование собственного шумоподобного сигнала существенно улучшает работу адаптивного фильтра и уменьшает уровень боковых лепестков функции неопределенности, что дает дополнительный выигрыш в 10 — 20 дБ.
Таким образом, бистатический радар является реализуемым по отношению сигнал/шум для приведенных исходных данных, и существуют возможности по улучшению этого параметра для более сложных условий окружения, что требует дальнейших исследований.
Ключевые компоненты и программное обеспечение
Реализация бистатического радара требует разработки ключевых компонентов с высокой плотностью интеллектуальной составляющей. В частности, это касается радиотракта с широким динамическим диапазоном и высокой когерентностью в прямом и отраженном канале, а также быстродействующих средств обработки сигнала на базе DSP.
Такие компоненты представлены на рисунке 3.

Рисунок 3. Радиомодуль, содержащий прямой и отраженный канал, и DSP процессоры
Тракт обработки, представленный на фото, работает с различными сигналами. В частности, на рисунке 4 представлено сечение функции неопределенности сигнала по частоте для широкобазового сигнала с линейной частотной модуляцией (ЛЧМ):
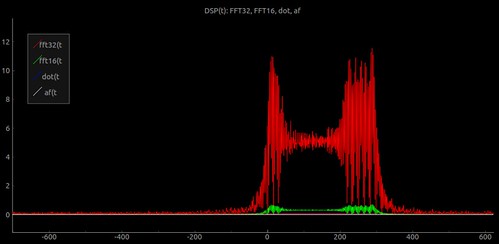
Рисунок 4. Сечение функции неопределенности ЛЧМ сигнала по частоте
Ответить